了解更多
segmentation:business-unit/EISG,segmentation:product-category/DMMs_DAQs_Function_Generators,keysight:product-lines/gm,segmentation:campaign/Bench,segmentation:funnel/bofu,segmentation:product-category/DMMs_DAQs_Function_Generators/Function_Generators,keysight:dtx/solutions/facets/workflow-stage/qa,keysight:dtx/solutions/facets/design-and-test-product/signal-generator,keysight:dtx/solutions/facets/development-area/high-speed-digital,keysight:dtx/solutions/facets/industry/semiconductor,keysight:dtx/solutions/facets/industry/automotive,keysight:models/sr/sr101edua,keysight:models/ed/edu33212a,keysight:models/ed/edux1052asegmentation:business-unit/EISG,segmentation:product-category/DMMs_DAQs_Function_Generators,keysight:product-lines/gm,segmentation:campaign/Bench,segmentation:funnel/bofu,segmentation:product-category/DMMs_DAQs_Function_Generators/Function_Generators,keysight:dtx/solutions/facets/workflow-stage/qa,keysight:dtx/solutions/facets/design-and-test-product/signal-generator,keysight:dtx/solutions/facets/development-area/high-speed-digital,keysight:dtx/solutions/facets/industry/semiconductor,keysight:dtx/solutions/facets/industry/automotive,keysight:models/sr/sr101edua,keysight:models/ed/edu33212a,keysight:models/ed/edux1052asegmentation:business-unit/EISG,segmentation:product-category/DMMs_DAQs_Function_Generators,keysight:product-lines/gm,segmentation:campaign/Bench,segmentation:funnel/bofu,segmentation:product-category/DMMs_DAQs_Function_Generators/Function_Generators,keysight:dtx/solutions/facets/workflow-stage/qa,keysight:dtx/solutions/facets/design-and-test-product/signal-generator,keysight:dtx/solutions/facets/development-area/high-speed-digital,keysight:dtx/solutions/facets/industry/semiconductor,keysight:dtx/solutions/facets/industry/automotive,keysight:models/sr/sr101edua,keysight:models/ed/edu33212a,keysight:models/ed/edux1052asegmentation:business-unit/EISG,segmentation:product-category/DMMs_DAQs_Function_Generators,keysight:product-lines/gm,segmentation:campaign/Bench,segmentation:funnel/bofu,segmentation:product-category/DMMs_DAQs_Function_Generators/Function_Generators,keysight:dtx/solutions/facets/workflow-stage/qa,keysight:dtx/solutions/facets/design-and-test-product/signal-generator,keysight:dtx/solutions/facets/development-area/high-speed-digital,keysight:dtx/solutions/facets/industry/semiconductor,keysight:dtx/solutions/facets/industry/automotive,keysight:models/sr/sr101edua,keysight:models/ed/edu33212a,keysight:models/ed/edux1052asegmentation:business-unit/EISG,segmentation:product-category/DMMs_DAQs_Function_Generators,keysight:product-lines/gm,segmentation:campaign/Bench,segmentation:funnel/bofu,segmentation:product-category/DMMs_DAQs_Function_Generators/Function_Generators,keysight:dtx/solutions/facets/workflow-stage/qa,keysight:dtx/solutions/facets/design-and-test-product/signal-generator,keysight:dtx/solutions/facets/development-area/high-speed-digital,keysight:dtx/solutions/facets/industry/semiconductor,keysight:dtx/solutions/facets/industry/automotive,keysight:models/sr/sr101edua,keysight:models/ed/edu33212a,keysight:models/ed/edux1052asegmentation:business-unit/EISG,segmentation:product-category/DMMs_DAQs_Function_Generators,keysight:product-lines/gm,segmentation:campaign/Bench,segmentation:funnel/bofu,segmentation:product-category/DMMs_DAQs_Function_Generators/Function_Generators,keysight:dtx/solutions/facets/workflow-stage/qa,keysight:dtx/solutions/facets/design-and-test-product/signal-generator,keysight:dtx/solutions/facets/development-area/high-speed-digital,keysight:dtx/solutions/facets/industry/semiconductor,keysight:dtx/solutions/facets/industry/automotive,keysight:models/sr/sr101edua,keysight:models/ed/edu33212a,keysight:models/ed/edux1052asegmentation:business-unit/EISG,segmentation:product-category/DMMs_DAQs_Function_Generators,keysight:product-lines/gm,segmentation:campaign/Bench,segmentation:funnel/bofu,segmentation:product-category/DMMs_DAQs_Function_Generators/Function_Generators,keysight:dtx/solutions/facets/workflow-stage/qa,keysight:dtx/solutions/facets/design-and-test-product/signal-generator,keysight:dtx/solutions/facets/development-area/high-speed-digital,keysight:dtx/solutions/facets/industry/semiconductor,keysight:dtx/solutions/facets/industry/automotive,keysight:models/sr/sr101edua,keysight:models/ed/edu33212a,keysight:models/ed/edux1052asegmentation:business-unit/EISG,segmentation:product-category/DMMs_DAQs_Function_Generators,keysight:product-lines/gm,segmentation:campaign/Bench,segmentation:funnel/bofu,segmentation:product-category/DMMs_DAQs_Function_Generators/Function_Generators,keysight:dtx/solutions/facets/workflow-stage/qa,keysight:dtx/solutions/facets/design-and-test-product/signal-generator,keysight:dtx/solutions/facets/development-area/high-speed-digital,keysight:dtx/solutions/facets/industry/semiconductor,keysight:dtx/solutions/facets/industry/automotive,keysight:models/sr/sr101edua,keysight:models/ed/edu33212a,keysight:models/ed/edux1052asegmentation:business-unit/EISG,segmentation:product-category/DMMs_DAQs_Function_Generators,keysight:product-lines/gm,segmentation:campaign/Bench,segmentation:funnel/bofu,segmentation:product-category/DMMs_DAQs_Function_Generators/Function_Generators,keysight:dtx/solutions/facets/workflow-stage/qa,keysight:dtx/solutions/facets/design-and-test-product/signal-generator,keysight:dtx/solutions/facets/development-area/high-speed-digital,keysight:dtx/solutions/facets/industry/semiconductor,keysight:dtx/solutions/facets/industry/automotive,keysight:models/sr/sr101edua,keysight:models/ed/edu33212a,keysight:models/ed/edux1052asegmentation:business-unit/EISG,segmentation:product-category/DMMs_DAQs_Function_Generators,keysight:product-lines/gm,segmentation:campaign/Bench,segmentation:funnel/bofu,segmentation:product-category/DMMs_DAQs_Function_Generators/Function_Generators,keysight:dtx/solutions/facets/workflow-stage/qa,keysight:dtx/solutions/facets/design-and-test-product/signal-generator,keysight:dtx/solutions/facets/development-area/high-speed-digital,keysight:dtx/solutions/facets/industry/semiconductor,keysight:dtx/solutions/facets/industry/automotive,keysight:models/sr/sr101edua,keysight:models/ed/edu33212a,keysight:models/ed/edux1052asegmentation:business-unit/EISG,segmentation:product-category/DMMs_DAQs_Function_Generators,keysight:product-lines/gm,segmentation:campaign/Bench,segmentation:funnel/bofu,segmentation:product-category/DMMs_DAQs_Function_Generators/Function_Generators,keysight:dtx/solutions/facets/workflow-stage/qa,keysight:dtx/solutions/facets/design-and-test-product/signal-generator,keysight:dtx/solutions/facets/development-area/high-speed-digital,keysight:dtx/solutions/facets/industry/semiconductor,keysight:dtx/solutions/facets/industry/automotive,keysight:models/sr/sr101edua,keysight:models/ed/edu33212a,keysight:models/ed/edux1052asegmentation:business-unit/EISG,segmentation:product-category/DMMs_DAQs_Function_Generators,keysight:product-lines/gm,segmentation:campaign/Bench,segmentation:funnel/bofu,segmentation:product-category/DMMs_DAQs_Function_Generators/Function_Generators,keysight:dtx/solutions/facets/workflow-stage/qa,keysight:dtx/solutions/facets/design-and-test-product/signal-generator,keysight:dtx/solutions/facets/development-area/high-speed-digital,keysight:dtx/solutions/facets/industry/semiconductor,keysight:dtx/solutions/facets/industry/automotive,keysight:models/sr/sr101edua,keysight:models/ed/edu33212a,keysight:models/ed/edux1052asegmentation:business-unit/EISG,segmentation:product-category/DMMs_DAQs_Function_Generators,keysight:product-lines/gm,segmentation:campaign/Bench,segmentation:funnel/bofu,segmentation:product-category/DMMs_DAQs_Function_Generators/Function_Generators,keysight:dtx/solutions/facets/workflow-stage/qa,keysight:dtx/solutions/facets/design-and-test-product/signal-generator,keysight:dtx/solutions/facets/development-area/high-speed-digital,keysight:dtx/solutions/facets/industry/semiconductor,keysight:dtx/solutions/facets/industry/automotive,keysight:models/sr/sr101edua,keysight:models/ed/edu33212a,keysight:models/ed/edux1052asegmentation:business-unit/EISG,segmentation:product-category/DMMs_DAQs_Function_Generators,keysight:product-lines/gm,segmentation:campaign/Bench,segmentation:funnel/bofu,segmentation:product-category/DMMs_DAQs_Function_Generators/Function_Generators,keysight:dtx/solutions/facets/workflow-stage/qa,keysight:dtx/solutions/facets/design-and-test-product/signal-generator,keysight:dtx/solutions/facets/development-area/high-speed-digital,keysight:dtx/solutions/facets/industry/semiconductor,keysight:dtx/solutions/facets/industry/automotive,keysight:models/sr/sr101edua,keysight:models/ed/edu33212a,keysight:models/ed/edux1052a
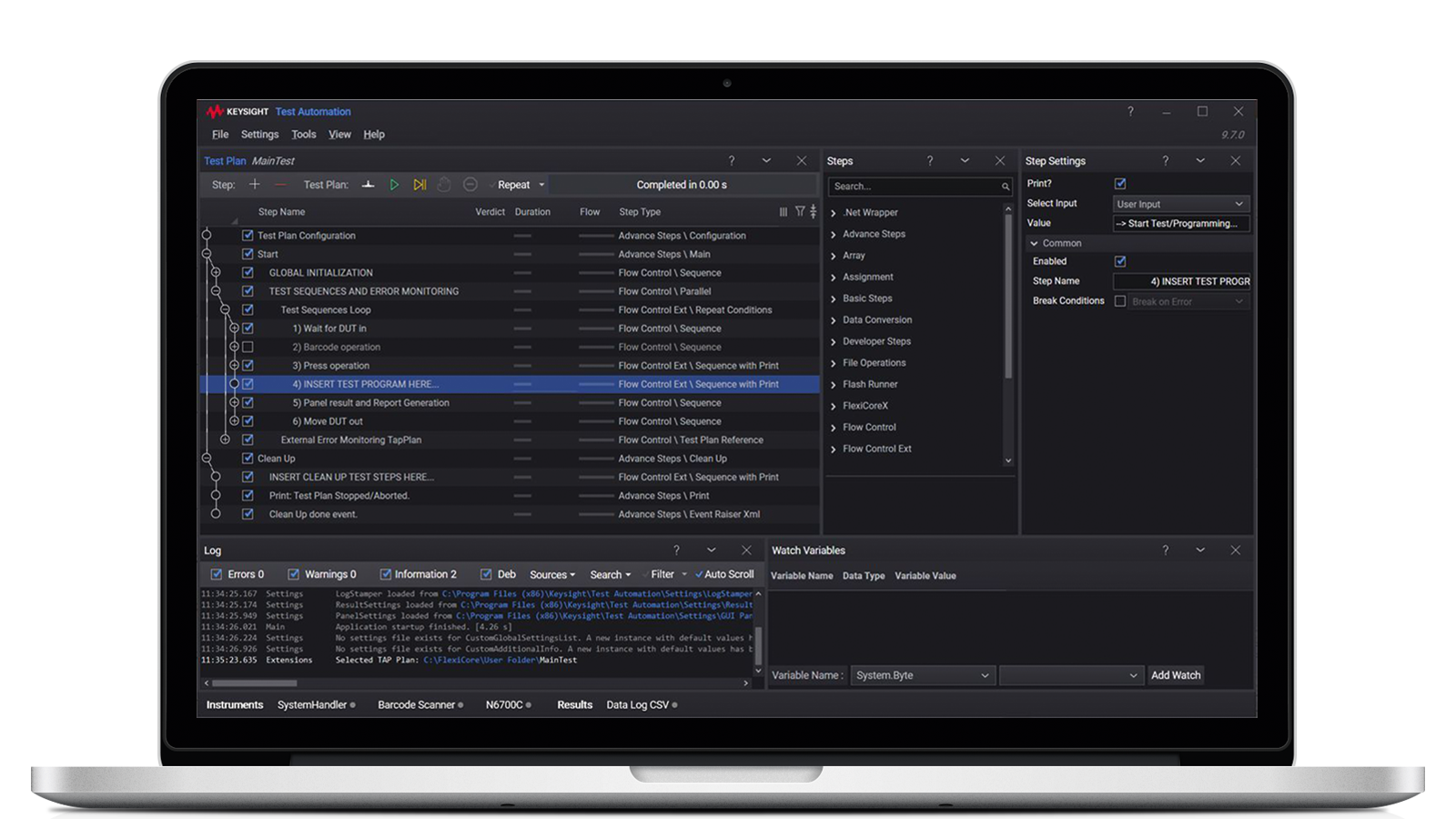
如何仪器 控制和自动化仪器
产品开发、生产测试或产品验证需要测试自动化来捕获、处理并绘制大量数据以供分析。学习如何使用Python构建测试自动化系统,控制仪器设备,并通过测试自动化软件执行数据分析。
了解更多