您希望搜索哪方面的内容?

特点
使用雷达场景仿真器对基于雷达的自动驾驶功能特性进行测试
要想提高车辆的自动驾驶水平,设计人员需要经过大量训练、稳健可靠的算法来解析车载雷达传感器探测到的雷达反射波形。 是德科技的新技术将数百个微型雷达目标仿真器组合成一个可缩放的屏幕,从而能够以高达 512 像素的分辨率仿真距离最近仅 1.5 米的目标。 这种突破性的雷达场景仿真解决方案克服了传统雷达传感器测试解决方案的诸多缺点,例如视野(FOV)有限,无法仿真距离小于 4 米的目标等等。
利用“全场景生成”功能,这个雷达场景仿真解决方案可以向实际的传感器提供时间同步输入,对您的自动驾驶系统和算法进行训练。 其开放式体系结构还可以与您现有的硬件在环(HIL)系统和 3D 建模程序形成闭环。 利用这些功能,该解决方案可以补充软件仿真和道路测试的不足,并填补两者之间的空白。 因此,它可以克服软件仿真无法测试真实雷达传感器响应的缺点,同时还能够对雷达场景进行可重复的测试,这是路测无法实现的。
雷达场景仿真器还使您可以仿真真实世界的驾驶场景,改变连续视野内目标的速度、距离和数量。 雷达传感器和后端软件让您可以信心十足地测试复杂的真实驾驶场景,帮助您更快、更低风险地实现 ADAS 和新一代自动驾驶的愿景。
实验室内的完整雷达场景仿真
- 以高达 512 像素的分辨率、±70° 的连续水平视野和 ±15° 的连续垂直视野,全方位训练雷达传感器和系统
- 能够生成距离 1.5 米到 300 米、速度为 0 到 400 千米/小时的静态和动态目标,支持短程、中程、远程毫米波雷达
- 利用机械固定的射频前端提供可重复的到达角(AoA)准确度,可以仿真多目标、多角度的场景
- 通过逼真的干扰测试,仿真射频设备密集的复杂城市场景
- 使用三维点云和多次反射,能够更准确地探测和分辨目标
雷达场景仿真器背后的技术支柱
创新技术将雷达场景仿真器变成现实。 听听是德科技实验室的汽车测试专家和我们的合作伙伴 IPG 汽车公司介绍他们如何实现这些技术突破,技术原理是什么,以及如何从支持 20 到 40 多个雷达目标迅速升级到支持 512 个雷达目标。
我们邀请汽车测试社团参加全新 Keysight AD1012A 雷达场景仿真器激动人心的技术发布会。
是德科技首次推出的雷达场景仿真器技术将会帮助您开发稳健的先进驾驶员辅助系统(ADAS)雷达传感器和算法,为实现完全的自动驾驶目标铺平道路。
参加是德科技雷达场景仿真器线上发布会,了解更多信息!
这个演示将有助于您了解雷达场景仿真器如何通过以下功能实现全场景仿真,从而获得更清晰的 ADAS 雷达视野。这些功能包括:
- 使用 +/-70° 的宽广视野(FOV)进行测试,对近处和远处目标都一览无遗。
- 应用灵活的测试场景,其中环境条件、交通密度、速度、距离和目标总数均可改变。
- 加速训练 ADAS / AV 算法,使用复杂的可重复场景尽早进行测试。
听一听 IPG 介绍他们的仿真技术如何与是德科技的雷达场景仿真器相互协作,利用创新的方法来训练 ADAS 和 AV 算法。




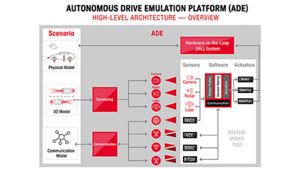
通过这个演示,您将看到我们的雷达场景仿真技术何以成为是德科技自动驾驶仿真平台的核心。 详细了解:
- 是德科技创新的小型化雷达目标仿真器如何将测试模式从目标探测转变为交通场景仿真。
- 雷达场景仿真器、无线非视距传感器和时间同步软件如何在实验室中协同开展测试。
- 硬件在环(HIL)系统如何仿真所有相关车载 ADAS 传感器的同步连接。
是德科技雷达场景仿真器荣获的奖项®
- 2022 AutoSens 银奖:最佳验证/仿真工具
- 2022 电子工业奖:年度汽车产品――获得高度赞赏


主要技术指标
扩展雷达场景仿真器的功能
加快学习雷达场景仿真知识



















需要帮助或遇到问题?
- © 是德科技 2000–2024
- 隐私
- 网站地图
- 条款
- 商标致谢
- 反馈
-
京ICP备20005161号
 京公网安备 11010502040140 号
京公网安备 11010502040140 号